Nähere Informationen über das Projekt und seine Hintergründe auf der Seite 3D-Modell dank Flugdrohne
Kopie ProjektM-Terminplan-20140614
22.06.2014
. Die abschliessende Mission meines Projektes ist durchgeführt. Sie fand wie bereits meine
. Test-Mission in Seftigen statt. Ich habe mich gegen Flüge am Seebergsee entschieden, da
. es meiner Meinung nach einen zu grossen Aufwand und ein zu hohes Risiko darstellte. Bei
. den üblichen Sicherheischecks am Vorabend brannte noch ein Servo der Kameraaufhängung
. aus, beschädigte dabei aber keine weiteren Komponenten. Ich tauschte ihn daraufhin gegen
. einen Ersatzservo aus.
. Das Ziel meiner Abschluss-Mission war es, das Bildmaterial für mein finales 3D-Landschafts-
. modell zu erstellen.
. Die Mission fand zwischen 7:30 Uhr und 8:30 Uhr in Seftigen statt. Sie bestand aus drei
. einzelnen Flügen:
. 1. Beinhaltete 2/3 des gesamten Gebietes. Durchschnittliche Flughöhe auf 130 Metern über
. Boden, schleifenförmige Flugbahn. -> 155 Senkrechtfotos
. 2. Überflug des gesamten Gebietes mit seitlich ausgerichteter Kamera.
. Flughöhe: 50, 80 und 90 Metern über Boden. Schlaufenförmige Flugroute
. Die Kamera drehte sich stets selbstständig zum Berg. (Fassaden der Gebäude + seitliche
. Ansichten von Bäumen und Büschen) -> 108 Schrägbilder
. 3. Umfasste 1/3 des Fluggebiets. Flughöhe: 60, 70 und 100 Meter über Boden.
. Flugroute: Schlaufenförmig. -> 42 Senkrechtfotos
. Die gesamte Flugzeit belief sich auf knapp 25 Minuten. Das überflogene
. Gebiet besitzt eine Grundfläche von rund 540000 Quadratmeter -> 0.54 Quadratkilometer
. und ist somit fast vier mal so gross wie die, der vorangehenden Testmission. Die gesamte
. zurückgelegte Flugstrecke belief sich auf ca.13 Kilometer.
. Die Kamerahalterung bekam bei der zweit letzten Landung noch ein paar Kratzer ab. Sie
. behinderten allerdings den Verlauf des dritten Fluges nicht. Alles in allem bin ich mit den
. entstandenen Bildern zufrieden und freue mich schon auf das fertige 3D-Modell.
10.06.2014
. Die neu gewonnenen Einzelbilder der letzten Testflüge müssen bevor sie für ein 3D-Modell
. verwendet werden können noch vom „Fischaugen-Effekt“ befreit werden. Dafür habe ich
. bereits die Programme Gimp, Photoshop CS4 und Lightroom 5.4 verwendet. Lightroom 5.4
. liefert bisher die besten Ergebnisse.
. Auch für die schlussendliche Verarbeitung zu einem 3D-Modell suche ich derzeit eine
. geeignete Software. Meinen vier bisher getesteten Programmen (VisualSFM, 123d catch,
. ReCap 360, und einer Testversion von Agisoft Photoscan), liefern alle sehr unterschiedliche
. Resultate. Agisoft Photoscan hat allerdings bisher die Nase vorne.
. 
07.06.2014
. Eine weitere „erfolgreiche“ Testmission ist abgeschlossen. Erstmals entstanden horizontal
. aufgenommene Bilder des überflogenen Gebietes. Das dabei entstandene Bildmaterial deckt
. in etwa 130’000 Quadratmeter -> 0.13 Quadratkilometer ab. Die Mission bestand aus zwei
. separaten Flügen:
. 1. Horizontaler Überflug des Gebietes auf 80 bzw. 170 Metern in einer Schlaufenförmigen
. Flugstrecke. -> 25 Fotos von „oben“
. 2. Überflug mit seitlich ausgerichteter Kamera, ebenfalls auf ca. 80 bzw. 170 Metern. Flug
. in schlaufenform. Die Kamera drehte sich stets selbstständig zum Berg. -> 40 Fotos von
. der „Seite“. (Fassaden der Gebäude + seitliche Ansichten von Bäumen und Büschen)
. Das Flugwetter war wie erwartet optimal und die beiden Flüge erfolgten Reibungslos.
. Doch wie fast jedes Mal, hat der Flieger dennoch ein paar Kratzer abbekommen:
. Beim Start des Dritten Fluges (Er sollte zeigen, ob und wie ein Flug in 250 Metern im Hinblick
. auf die Situation am Seebergsee zu bewerkstelligen wäre.) landete der Flieger erneut unsanft
. auf der Nase, so dass die bereits zuvor gebrochenen und wieder reparierten Stellen erneut
. aufsprang. Die Verbesserte Fixierung der Batterie bewahrte die Kameraaufhänung erfolgreich
. vor Schäden. Nach erneutem Leimen wird der Flieger wieder einsatzbereit sein.
. Für die Flüge verwendete ich die grösseren Propeller. Die Hitzeentwicklung hielt sich ohne
. Gegenwind in Grenzen. -> Ich werde ihn weiterhin benutzen.
. 

04.06.2014
. Da für eine erfolgreiche Mission viel von den jeweiligen Wetterverhältnissen abhängt, habe
. ich mich diesbezüglich noch etwas genauer informiert. Für einen Gelungenen Flug bräuchte es
. eigentlich gar nicht viel:
. – Genügend Licht für gute Fotos
. – kein Regen oder Dunst (Kleine Wassertröpfchen könnten die Kommunikation zwischen Flug-
. zeug und Fernsteuerung negativ beeinflussen)
. – Und das Wichtigste: Kein Wind! (In diesem Bereich habe ich ja bereits meine Erfahrungen
. gemacht…)
. Bei meinen ersten Testflügen vor etwa 3 Monaten war der Spätnachmittag die beste Flugzeit.
. Dies hat sich geändert. Laut meinen Beobachtungen ergeben sich die besten Flugmöglichkeiten
. am Morgen zwischen 7:00 und 8:00.
. Zu dieser Zeit ist die Sonne bereits aufgegangen und es herrscht Windstille. (Diese Beobachtungen
. habe ich an meinem Wohnort in Seftigen gemacht, und gelten daher natürlich nicht für den Rest
. der Schweiz.)
. Die neu gewonnenen Informationen werde ich am kommenden Samstag mit einem Testflug
. prüfen.
. 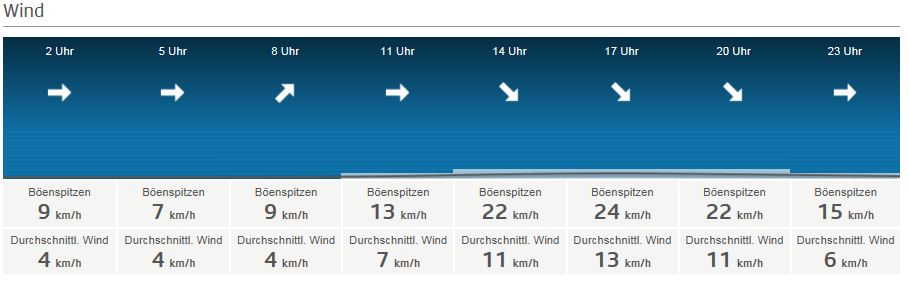
. Windentwicklung in Seftigen über einen Tag. (Samstag, 21.06.2014)
31.05.2014
. Vergangenes Wochenende besichtigten meine Familie und ich den Seebergsee im Diemtigtal.
. Es handelt sich dabei um einen kleinen Bergsees (etwa 1800m.ü.M) im Naturpark Diemtigtal.
. Womöglich wäre es eine gute Location für meine abschliessende Flugmission.
. Doch so schön es dort auch ist, ein Spaziergang wäre dieser Flug definitiv nicht!
. Während eins kleinen Rundganges sind mir folgende Hürden aufgefallen:
. – Es handelt sich um ein grosses Areal -> wir müssten ausserhalb unserer Telemetrie-Reichweite
. fliegen.
. – Der Höhenunterschied zwischen See und dem höchsten Objekt beträgt annähernd 300m
. (unsere bisher höchsten Flüge absolvierten wir auf rund 100m über dem Boden)
. – Es gibt lediglich zwei potentielle Landeplätze
. – Während unserer Besichtigung blies ein kräftiger und böiger Wind.
.
. Nach dieser „Begehung“ bin ich der Meinung, dass eine Mission in diesem Gelände machbar
. wäre. Allerdings sind Vorbereitungen und die ausführliche Planung im Vorfeld sehr aufwändig
. und Zeitintensiv.
. Eine definitive Entscheidung ist also noch nicht gefallen.
. 

24.05.2014
. In den letzten Tagen habe ich mich mit meinem Inhaltsverzeichnis beschäftigt. Es
. handelt sich dabei um die erste Version, welche ich in den kommenden Wochen noch erweitern
. werde. Die grobe Struktur entspricht in etwa dem vorangehenden Zeitplan.
18.05.2014
. Die Drohne ist wieder repariert und einsatzfähig. Ich habe dabei die Gelegenheit genutzt, um
. die Kamerahalterung an einigen Stellen stabiler zu bauen.
. Die Batterie im Innern der Drohne ist nun ebenfalls neu platziert und fixiert. Sie sollte jetzt einen
. erneuten Absturz besser überstehen. (Wobei ich natürlich hoffe, dass es die letzte unsanfte
. Landung war!)
10.05.2014
. Nach nun mehr drei Wochen warten auf gutes Flugwetter habe ich heute den schönsten Tag der
. Woche genutzt, um den ersten Flug mit Kameraaufhängung und einem neuen Propeller zu
. absolvieren. Die Bedingungen waren nicht optimal und starke Windböen während des Fluges
. führten sogar zu einem Absturz.
. Eine kurze Analyse des Fluges:
. – Die Startbedingungen waren dank einer kurzen Windflaute in Ordnung.
. – Dank des neuen Propellers war ein rasches Aufsteigen nach dem Start möglich. Das zusätzliche
. Gewicht war kaum zu spüren.
. – Die zuvor erstellte Mission verlief wie geplant und lieferte die gewollten Ergebnisse:
. – Das Ein- und Ausfahren, das selbstständige Rotieren, sowie das Auslösen der Gopro ist nun
. auch in der Luft und in einer autonomen Mission möglich.
. – Nach dem das Ziel des Fluges erreich war steuerte ich das Flugzeug in grossen Kreisen dem
. Boden entgegen, um einen Landeversuch zu starten.
. – In der Zwischenzeit hatte der Wind aufgefrischt und kräftige Böen erschwerten den Landeanflug.
. – Bei der letzten Kurve wurden die Kräfte auf eine Steuerklappen zu gross. Die Verbindung
. zwischen Servo und Steuerklappe wurde aus dem Styropor gerissen. Das Flugzeug war nun
. nicht mehr kontrollierbar und stürzte die 6 verbleibenden Meter bis zum Boden ab.
. Schäden:
. – Der Rumpf brach auf der linken Seite in zwei Hälften.
. – Die Batterie zerdrückte die Kamerahalterung und zerbrach sie in 3 Teile.
. – Kleine Kratzer an den Flügeln und der Unterseite des Flugzeugs.
. Massnahmen:
. – Das Kleben des Rumpfes und die Reparatur der Kamerahalterung wird mich wahrscheinlich etwa
. 2 Stunden kosten. Das erneute Justieren nochmals 2 Stunden.
. – Der Motor wurde auf Grund des grösseren Propeller wie erwartet ziemlich heiss. Ich bin mir noch
. nicht sicher, ob ich eine erneute Überhitzung riskieren soll.
. Fazit:
. Ich hatte Glück, dass sich der Zwischenfall im Landeanflug und damit bei einer geringen Flughöhe
. ereignet hatte. Die Schäden sind vergleichsweise leicht zu reparieren und die Elektronik blieb
. unbeschädigt.
. Ich weiss nun, dass mein Aufbau funktioniert und dass ich in Zukunft nur noch bei optimalen
. Bedingungen fliegen werde.
. 

. Ein Bild auf die linke Seite mit einem Teil des Flügels
05.05.2014
. Ich warte immer noch auf geeignete Wetterbedingungen. In der Zwischenzeit habe ich ausprobiert,
. ob das Ein-und Ausfahren der Kameraaufhängung auch bei Gegenwind funktioniert. Dabei
. habe ich den Gegenwind mit einem Haarföhn simuliert. Auch bei der höchsten Stufe funktionierte
. alles reibungslos.
29.04.2014
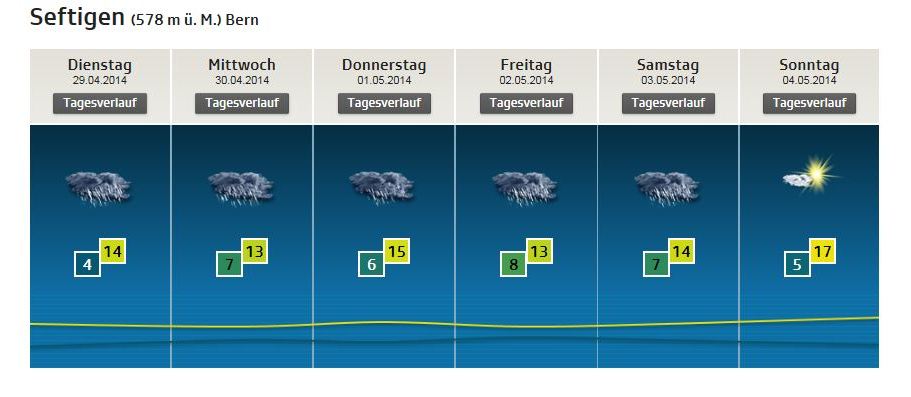
. Mein Plan in der ersten Schulwoche nach den Frühlingsferien den ersten Testflug mit Kamera-
. halterung zu wagen scheiterte am Wetter.
. Auch die nun folgende Woche wird eindeutig keine Flugmöglichkeit bieten. (Bild unten)
. 
15.04.2014
. Die letzten Verfeinerungen und Test an der Kameraaufhängung sind abgeschlossen und eine
. neue Testmission ist erstellt.
. Rein zufällig hat sich beim Experimentieren auch das Problem mit der 180 Grad Drehung gelöst:
. – Wenn ich den Servo am Laptop auslöse, erreiche ich sogar bis zu 200 Grad Auslenkung.
. Leider blies heute bei uns eine kräftige Biese.
. Den ersten Flug mit Kamerahalterung werde ich in der ersten Woche nach den Frühlingsferien
. wagen. (Ich verreise über Ostern)
14.04.2014
. Die lange Recherche war seine Mühe wert! Ich habe verschiedenes heraus gefunden:
. – Die Anfangs- und Endpunkte des Auslöseservos sind gefunden und notiert.
. – Ein Servo kann entweder per Kippschalter oder automatisch ausgelöst werden. Da ich dem
. Rotieren der Kamera bereits einen Schalter zugewiesen hatte, wäre es mir nicht möglich gewesen
. eine automatische Rotation des Servos in einer autonomen Mission ein zu binden. (Das wäre ja
. nicht mehr „autonom“).
. – Ich weiss nun wo ich jedem Servo seinen „Job“ und die jeweilige Art wie ich ihn auslösen möchte
. festlegen kann. (Dies geschieht in einer langen Parameterliste)
. Dank dieser Erkenntnisse habe ich mein bisheriges Setup nochmals ein wenig abgeändert. Da ich
. bereits viel Zeit in dieses Gebiet investiert hatte gingen die Umbauten relativ rasch.
. – In einer autonomen Mission wird jetzt der Rotations- und der Kameraauslöseservo automatisch und
. ohne mein Zutun ausgelöst.
. – Diese Änderung erlaubte es mir die zwei Servos, welche ich einige Tage zuvor auf einen
. Kippschalter gelegt hatte, wieder über je einen separaten Schalter aus zu lösen.
. Das gibt mehr Flexibilität und Sicherheit.
13.04.2014
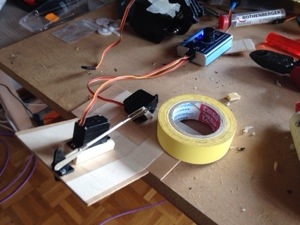
. Der Kameraauslöser ist fast fertig. Ich habe einen Weg gefunden den Servo an der Kamera zu
. befestigen. (Klebeband auf Kamera -> Servo mit Heissleim auf Klebeband aufleimen)
. Im Moment versuche ich den Anfangs- und den Endpunkt des Servoausschlags fest zu legen.
. Wird er zu wenig aus gelenkt wird der Auslöser der Gopro nicht betätigt. Bei zu starker Auslenkung
. löst sich der Servo von der Kamera.
. Um zu verstehen, wie ich den Servo ohne einen Kippschalter am Sender auslösen kann – und das zur
. richtigen Zeit – muss ich viel recherchieren und die verschiedenen Vorschläge ausprobieren und für
. mein Vorhaben abändern. Das braucht viel Zeit und Geduld.
12.04.2014
. Ich stattete heute dem Fachhändler einen weiteren Besuch ab. Ich besorgte grössere Propeller-
. blätter um die Effizienz und somit die Flugdauer zu erhöhen. Dabei steigt allerdings die Gefahr einer
. erneuten Überhitzung des Motors.
. Eine passenden Servo für das Rotieren meiner Kamera hatten sie allerdings nicht auf Lager.
11.04.2014
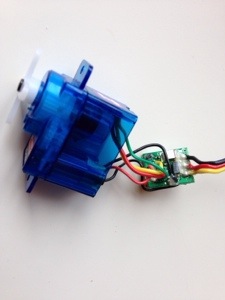
. Den heutigen Tag habe ich dem Modifizieren eines Servos gewidmet. Mit Hilfe von zwei kleinen
. Widerständen habe ich versucht das Potentiometer, welches sich im Innern des Servos befindet,
. zu „überlisten“. Es liest normalerweise ab, wie weit der Servo durch den Motor gedreht wurde.
. Beim Erreichen des gesetzten Ziels, kappt es die Stromzufuhr zum Motor.
. Trotz dieser Modifikationen schaffte es der Servo nur auf ca. 160 Grad.
. Am Ende des erfolglosen Tüftelns habe ich mich nochmals in verschiedenen Internetforen umgesehen.
. Wie ich nun weiss, gibt es spezielle Servos mit einer Auslenkung von 180 Grad. Die Beschaffung
. wird allerdings mindestens eine Woche betragen. (Lieferung aus Amerika)
10.04.2014
. Das Rotieren der Kamera um ihre eigene Achse ist nun möglich. Ich konnte dazu wie geplant den
. frei gewordenen Kippschalter am Sender verwenden. Es zeigt sich allerdings ein neues Hindernis:
. Der verwendeten Servo lässt sich keine 180 Grad aus lenken. Ich erreiche lediglich 150 Grad. Ohne
. diese 180 Grad ergibt meine Konstruktion aber keinen Sinn. Dies hätte eine erneute Abänderung am
. Aufbau der Kamerahalterung zur Folge.
. Ursprünglich hatte ich geplant, die Kamera über ein Kabel (Das Kabel verbindet Kamera und
. Steuerungsboard) aus zu lösen. Recherchen im Internet haben aber gezeigt, dass dieses Verfahren
. lediglich mit Kameras der Marke „Canon“ kompatibel ist. Daher habe ich mich für das Auslösen per
. Servo entschieden. Das Montieren des zusätzlichen Servos am Gopro-Gehäuse klappte aber bisher
. noch nicht. Die Oberfläche des Gehäuses besteht nämlich aus einem speziellen Plastik an der
. Heissleim nicht haften bleibt. Andere Klebersorten wie Sekundenkleber kommen nicht in Frage.
. Das Risiko einer Fehlplatzierung und die dabei entstehende „Verschandelung“ der Kamera versuche
. ich zu vermeiden.
09.04.2014
. Heute ist es mir gelungen das Ausfahren der Kamerahalterung mit lediglich einem Kippschalter
. zu steuern. Der frei gewordenen Schalter wird nun für das Rotieren der Kamera benutzt.
. Auf der Suche nach einer Lösung habe ich viel Zeit mit dem Programmieren des Senders verwendet.
. Nach stundenlangem tüfteln wird beim Ausfahren der eine Servo stark verlangsamt und beim
. einfahren der Aufhängung stark beschleunig. Es verhindert, dass sich die Kameraaufhängung noch im
. Inneren der Drohne entfaltet, auf Grund des geringen Platzes verkantet und sich schliesslich selbst
. zerstört.
. Für das Auslösen der Gopro habe ich noch keine zufriedenstellende Lösung gefunden.
. 
08.04.2014
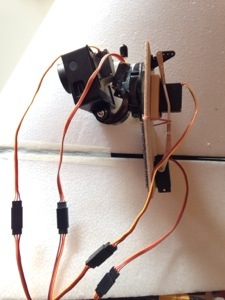
. Die Kameraaufhängung samt Gopro ist in der Nase das Flugzeug eingebaut. Ich habe mich für
. die Nase entschieden, da sie am meisten Platz bietet und am weitesten vom Motor entfernt ist.
. Durch die grösstmögliche Distanz und dem Einbauen von Schaumstoff erhoffe ich mir die Vibrationen
. des Motors zu dämpfen.
. Das neue Loch auf der Unterseite der Drohne, aus welchem die Kameraaufhängung ausgefahren
. wird, versuche ich so klein wie möglich zu halten, um die Stabilität des Rumpfes zu wahren. Bei
. Instabilität werde ich zusätzliche Karbonstangen einbauen.
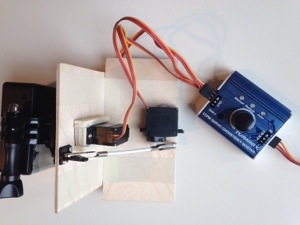
. Die grösste Schwierigkeit beim Einpassen der Kameraaufhängung ist zu gewährleisten, dass sich
. alle Servos ungehindert und ohne sich in die Quere kommend auf möglichst kleinem Raum
. bewegen können.
. Es ist nun möglich die Kameraaufhängung aus dem Flugzeugrumpf auszufahren. Dazu müssen
. zwei separate Kippschalter an der Fernsteuerung betätigt werden. Da diese zwei Schalter allerdings
. die Einzigen freien Schalter waren, stellt sich mir nun die Frage, wie ich die Gopro rotieren lassen und
. den Auslöser der Kamera betätigen soll.

07.04.2014
. Das Erarbeiten einer brauchbaren Lösung zum verbinden der Gopro mit der Kameraaufhängung
. hat mich viel zeit gekostet. Die beiden Teile werden nun von einer 2mm dicken und 3mm langen
. Schraube zusammengehalten. Auch der Rotationsservo ist einsatzbereit.
. Auf den Servo, welcher den Auslöser der Kamera betätigt, werde ich mich später konzentrieren.
. Der nächste Schritt wird das einbauen der Kameraaufhängung in die Drohne sein.

06.04.2014
. Die zweite Bauphase hat laut Zeitplan begonnen. Somit starte ich nach dem erfolgreichen Bau
. eines Prototypen für die Kameraaufhängung sogleich mit der Finalen Version.
. Anstatt der leichten Depron-Platten verwende ich dünne und stabile Holzplatten. Bei Tests hat
. sich gezeigt, dass sich die Depron-Konstruktion unter der Last der Kamera biegt und sie so instabiler
. macht. Aus dem Fachhandel konnte ich mir Kleinteile wie „Plastikdraht“, „control horns“ und
. diverse Schrauben besorgen.
. Für die Montage des „Rotationsservos“ (Er soll die Gopro um die eigene Achse rotieren lassen) und
. die Verbindung zwischen Kamera und Aufhängung muss ich mir noch eine geeignete Lösung
. überlegen.
23.03.2014
. Nach einigen kleinen Abänderungen ist der Prototyp für die Kameraaufhängung fertg.
. Auf Grund der Gewichtstests und den daraus resultierenden Ergebnissen, habe ich das Design
. komplett überarbeitet.
. Die Kameraaufhängung ist derzeit ausschliesslich mit einer „Gopro Hero“ kompatibel. (Theoretisch
. könnte nach kleinen Umbauten auch eine andere Kamera benutzt werden.)
. Ich habe mich vorerst für die Gopro entschieden, da sie leicht und gut montier bar ist. Sie wäre
. eigentlich als FPV-Kamera gedacht gewesen, wird aber, da das Fliegen per FPV auf Eis gelegt ist,
. nicht mehr benutzt.
. Eine Gopro bringt allerdings auch einen grossen Nachteil mit sich: Die stark gekrümmte Linse
. verfälsch das Bild, so dass es nachträglich bearbeitet werden muss.
.
. Die Kameraaufhängung habe ich aus möglichst viel leichtem und dafür nicht ganz so stabilem
. Material zusammengebastelt. Sie dient lediglich zur Überprüfung meiner Pläne. Die nächsten
. Schritte sind das Koppeln des Prototyps an das Flugzeug, um die Bewegungen der drei Servos
. zu überprüfen.

16.03.2014
. Die ersten Beiden Test-Missionen, bei denen die Drohne selbstständig zuvor festgelegte Ziele
. ansteuert , sind abgeschlossen. Die wichtigsten Erkenntnisse, welche aus diesen jeweils etwa
. 5 minütigen Flügen hervor gingen, sind folgende:
. – Anfangs hatte ich noch Schwierigkeiten bei der Übermittlung der Flugziele vom Laptop auf
. die Steuereinheit der Drohne. Diese Probleme konnte ich beheben.
. – Ich kann nun zwischen 5 anstatt 3 Flight Modes wechseln. Bei Bedarf bestünde sogar die
. Möglichkeit einen Sechsten hinzuzufügen.
. – Die Reichweite der Verbindung zwischen Drohne und Laptop ist nun bekannt. Diese
. ist während des Fluges von essenzieller Bedeutung, da ich über sie wichtige Live-Daten, wie
. etwa die jeweilig Verbleibende Spannung der Batterie, erhalte. Sie beträgt etwa 450m.
. Auf dem Anschliessenden Bild ist das Verlieren und Wiedererlangen einer Verbindung deutlich
. zu erkennen.
. Die Drohne war auf dem Weg von „Wegpunkt 1“ zu „Wegpunkt 2“, als die Verbindung abbrach.
. Der Laptop konnte so nur die halbe Mission mit der violetten Linie aufzeichnen.
. 
08.03.2014
. Nach den erfolgreichen Flügen am vorherigen Sonntag folgten Tests mit FPV und mehr Gewicht
. durch eine zweite Batterie.
. Erster Flug: Eine Batterie / komplette FPV-Ausrüstung
. – Der Start verlief wie geplant. Das zusätzliche Gewicht war beim Fliegen allerdings deutlich zu
. spüren. Das Flugzeug wurde träger und schwerer zu kontrollieren. Das Gewicht schlug sich ebenfalls
. in einer kürzeren Flugzeit und einer höheren Sinkrate (-2 m/s) beim Gleitflug nieder. (Dies ist beides
. logisch und nachvollziehbar, aber stärker, als ich erwartet hätte.) -> Flugzeit: ca. 10min.
. Zweiter Flug: Zwei Batterien / komplette FPV-Ausrüstung
. – Der erste Start misslang. Das Flugzeug war so schwer, dass es trotz 100% Schub direkt in den Boden
. krachte. (Glücklicherweise ohne Schäden zu verursachen.)
. Beim zweiten Start war es schon etwas besser aber trotzdem knapp. Diese zweite Batterie war
. eindeutig zu viel des Guten. Die Sinkrate lag zwischen -3 und -4 m/s und machte das Gleiten ohne
. Motor fast unmöglich. Dies wiederum führte dazu, dass die Akkus keine Ruhepausen hatten, um sich
. zu erholen. -> Flugzeit: ca. 6min.
. Dritter Flug: Eine Batterie / nur die GoPro Hero 3+, ohne FPV-Zubehör
. – Eindeutig die beste Konstellation.
. Sinkrate: -2 m/s und eine Flugzeit von rund 15min.
. Fazit:
. – Gewicht wird noch eine sehr grosse Rolle spielen. Ich muss daher ein noch grösseres Augenmerk
. auf das Endgewicht des Flugzeugs legen und es so gering wie möglich halten.
. – Das fliegen mit FPV wird wahrscheinlich wegen des zusätzlichen Gewichts und des
. Stromverbrauchs vorerst in den Hintergrund treten. Die Qualität der Bildübertragung liess
. ebenfalls zu wünschen übrig.
. – Möglicherweise könnte ein neuer, grösserer Propeller einen noch effizienteren Flug ermöglichen.
. Ich werde mich daher auf die Suche nach einem Propeller mit den geeigneten Massen begeben.

05.03.2014
. Bei nahezu perfekten Wetterverhältnissen konnte ich wie geplant den zweiten Testflug absol-
. vieren; und dieses Mal ohne Crash!
. Vor dem Flug war ich ziemlich aufgeregt und nervös, da ich den „Flug“ vom vorigen Tag noch
. immer nicht ganz verdaut hatte. Da wurde mir auch zum ersten Mal wirklich bewusst, wie viel
. Risiko jedes Mal mitfliegt.
. Wie sich herausstellte war die nicht optimale Gewichtsverteilung das Hauptproblem des
. letzten Fluges. Nun funktioniert endlich alles bestens.
. Ich bin beindruckt, wie stabil und träge das Flugzeug fliegt und wie gut es gleiten kann. Bis jetzt
. bin ich mit meiner Wahl zufrieden.
![IMG_1152[1]](http://dominic.grandjean.ch/wp-content/uploads/2014/03/IMG_11521.png)
. Dieser Link führt zu einem kurzen Video.
. (Es dauert eine Weile, bis es vollständig geladen ist…)
. Flug-02
01.03.2014
. Heute war es soweit der Erstflug ist geschafft. Allerdings kann man da nicht von „fliegen“ spre-
. chen. Es war eher eine kurze unkontrollierte Achterbahnfahrt mit einem zum glück mehr oder
. weniger glimpflich ausgegangenen Crash als Krönung…
. Eine kurze Analyse des Fluges:
. – Der Handstart verlief reibungslos.
. – Auf Grund der Rotation des Motors auf die linke Seite, vollzog das Flugzeug eine leichte Links-
. kurve. (Das hatte ich zuvor schon erwartet und wäre auch weiter nicht schlimm gewesen.)
. – Allerdings lag der Schwerpunkt leicht im hinteren Teil des Flugzeugs. Es flog dadurch
. konstant und mit einer Steigung von etwa 45° aufwärts.
. – Ich verringerte den Schub, was sich als Fehler herausstellen sollte.
. – Mit dem geringeren Schub verlor der Flieger an Geschwindigkeit. Ich hatte Probleme ihn
. kontrolliert zu steuern. Als ob die Signale mit etwa 5sec Verzögerung einträfen oder mir der
. Autopilot dazwischen funken würde.
. – Wegen der zu geringen Geschwindigkeit gab es einen Strömungsabriss an beiden Flügeln.
. – Das Flugzeug stürzte nun unkontrollierbar trudelnd auf ein etwa 10m von mir entferntes
. Feld.
. Schäden:
. – Die Schäden hielten sich glücklicherweise in Grenzen, da ich den Flieger kurz vor dem Aufprall
. nochmals auf seinen Bauch drehen konnte.
. – Die beiden Winglets wurden herausgerissen und mussten neu montiert werden.
. – Der rechte Flügel wurde ein Stück aus seiner Halterung heraus gezogen und verbog sie leicht.
. – Zudem entstanden an der Unterseite einige Kratzer.(Sie sind nicht der Rede wert)
. Massnahmen:
. – Die Sensibilität der Steuerknüppel erhöhen.
. – Die Gewichtsverteilung verbessern. (Die Batterie muss weiter nach vorne)
. – Die leichte Linksbewegung aus trimmen.
. – Batterie und Flügel mit Klebeband besser sichern.
. – Nie zu wenig Gas geben! Ich möchte nicht noch einen zweiten Strömungsabriss hervor rufen.
. Alles in allem hatte ich grosses Glück und hoffe, dass der nächste für morgen geplante Flug ohne
. solche Pannen ablaufen wird.
23.02.2014
. Die letzten Änderungen an den Fernsteuerungs-Einstellungen und der Gewichtsverteilung im
. Flugzeug sind vorgenommen. Alle Batterien sind geladen und die wichtigsten Steck-
. Verbindungen überprüft.
. Meiner Meinung nach ist alles bereit für den Erstflug…
22.02.2014
. Der Motor ist glücklicherweise noch voll funktionstüchtig. Ich habe heute zwei neue Sicherheits-
. massnahmen erfolgreich umgesetzt, welche ein Überhitzen des Motors und das „Zerfallen“ der
. Motoraufhängung verhindern sollen.
. 1. Alle zugänglichen Klebestellen sind jetzt mit kleinen Schrauben besser fixiert.
. 2. Zwei neue Öffnungen auf der Oberseite des Rumpfes ermöglichen eine besser Kühlung des
. Motors und lassen ihn das nächste Mal hoffentlich nicht wieder überhitzen.
.
. 

21.02.2014
. Die Auto-Stabilisierung sollte jetzt ebenfalls funktionieren.
. Allerdings hat sich ein neues Problem gebildet. Beim ersten Test des Motors mit Propeller hat sich
. der Motor unerwartet aus seiner Verankerung gelöst. Er wurde aus der Motoraufhängung gerissen
. verursachte glücklicherweise keine grossen Schäden. Die Isolierungen der Kabel wurden leicht
. beschädigt, der Motor hat jetzt ein paar Kratzer und ist hoffentlich noch einsatzfähig…
. Die Ursache des Zwischenfalls war, dass sich der Motor bereits nach kurzer Laufzeit stark erwärmte.
. Die Hitze liess den Holzleim, den ich zum Zusammenbau der Motoraufhängung verwendet hatte
. wieder flüssig werden. Der Motor erledigte mit seinem Gewicht und seinen Vibrationen den Rest.
. Ich habe den Motor bereits ausgebaut um ihn auf weitere Schäden zu untersuchen. Zudem habe
. ich die beschädigten Stecker und Kabel neu isoliert.
.
. 
20.02.2014
. Die zwei Schalenhälften sind nun aufeinander geklebt.
. Ich kann zwischen drei „Flight Modes“ wechseln.
. Nach stundenlangem tüfteln und ausprobieren gibt es immer noch Probleme bei der
. Auto-Stabilisation der Drohne. Die manuelle Steuerung funktioniert jetzt allerdings einwandfrei.
. 
19.02.2014
. Beide Flügelhälften sind nun fertig verleimt. Die Winglets sind montiert und die Flügel somit einsatz-
. bereit. Der erste Teil der Technik (ohne FPV und Kamera) ist in der Drohne eingebaut. Auch die
. verschiedenen Positionen der Batterien sind festgelegt.
.
. 

18.02.2014
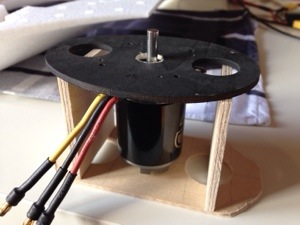
. Die neue Motoraufhängung ist fertig gestellt und muss nur noch eingebaut werden.
. Dabei habe ich viel Zeit auf das Dämpfen des Motors verwendet. (Ausprobieren von
. verschiedenen Materialien)
. Ich habe die Gleitfähigkeit der zwei Karbonstangen durch Abschleifen der scharfen Kanten verbesset,
. an der Flügelfixierung weiter gearbeitet und mir Gedanken über die Aufteilung der Technik im Innern
. des Flugzeugs gemacht.
.
. 

17.02.2014
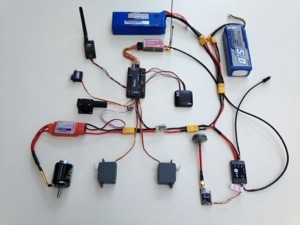
. Erstellen von Fotos der bis dahin bestehenden Technik, um deren Verknüpfungen später besser
. nachvollziehen zu können.
. Die Motorwelle ist zu dick für das Gewinde des Propellers. Ich habe mich in einem Spezialgeschäft
. nach einem grösseren Propellergewinde umgesehen.
. Fazit nach einem Gespräch mit dem Fachmann: Ich muss die Aufhängung des Motors neu
. überdenken. Ein erster Prototyp für die neue Aufhängung konnte ich bereits zusammenbasteln.
. Erste Test mit dem Kontrollboard (APM 2.6) und dem Empfänger. (Verknüpfung der beiden
. Komponenten).
.
. 
16.02.2014
. Beide Flügelhälften sind nach kleinen Abänderungen verklebt und mit je einem Servo bestückt.
. An der Fernsteuerung konnte ich den Transmitter des „Long Range System“ (LRS) montieren. Ein
. kleiner Lipo-Akku versorgt ihn mit genügend Strom.
. Bau eines Steckers für den Servo-Tester. Binden der Ersatzempfänger mit der Fernsteuerung.
.
. 

15.02.2014
. Alle Lötarbeiten sind beendet.
.
. 

03.02.2014
. Alle Pakete sind eingetroffen.
. Nächste Schritte: Auspacken -> Inhalt überprüfen -> Fotos der Einzelteile schiessen.
.
. 
26.01.2014
. Die restlichen Bauteile für das Flugzeug sind nach viel Recherche zusammengetragen.
. Die Einkaufsliste ist fertiggestellt und weitere Bestellungen auf verschiedenen Einkaufsplattformen
. wurden in Auftrag gegeben.
. Jetzt heisst es warten und die Daumen drücken, dass alles komplett und rechtzeitig geliefert wird.
22.01.2014
. Evaluation des Flugzeugs ist abgeschlossen. Der Flugzeugtyp und das zu kaufende Flugzeugmodell
. ist ausgewählt und bestellt.
. Im Moment erstelle ich die Stück- bzw. Einkaufsliste für die restlichen Bauteile.
21.01.2014
. „Kopie von ProjektM-Terminplan-20140101“ auf der Seite „Zeitplan“ bereit gestellt.
12.01.2014
. Arbeiten am Zeitplan.
. Recherche im Internet + erstellen der ersten Pläne und Skizzen.
09.01.2014
. Seiten „Blog“ und „Zeitplan“ erstellt.
.
2 Antworten